B树、B-树、B+树、B*树
来源: http://www.cnblogs.com/oldhorse/archive/2009/11/16/1604009.html http://blog.csdn.net/v_JULY_v/article/details/6530142/
1.前言
动态查找树主要有:二叉查找树(Binary Search Tree),平衡二叉查找树(Balanced Binary Search Tree),红黑树(Red-Black Tree ),B-tree/B+-tree/ B*-tree (B~Tree)。前三者是典型的二叉查找树结构,其查找的时间复杂度O(log$$2$$N)与树的深度相关,那么降低树的深度自然会提高查找效率。
但是咱们有面对这样一个实际问题:就是大规模数据存储中,实现索引查询这样一个实际背景下,树节点存储的元素数量是有限的(如果元素数量非常多的话,查找就退化成节点内部的线性查找了),这样导致二叉查找树结构由于树的深度过大而造成磁盘I/O读写过于频繁,进而导致查询效率低下(为什么会出现这种情况,待会在外部存储器-磁盘中有所解释),那么如何减少树的深度(当然是不能减少查询的数据量),一个基本的想法就是:采用多叉树结构(由于树节点元素数量是有限的,自然该节点的子树数量也就是有限的)。
也就是说,因为磁盘的操作费时费资源,如果过于频繁的多次查找势必效率低下。那么如何提高效率,即如何避免磁盘过于频繁的多次查找呢?根据磁盘查找存取的次数往往由树的高度所决定,所以,只要我们通过某种较好的树结构减少树的结构尽量减少树的高度,那么是不是便能有效减少磁盘查找存取的次数呢?那这种有效的树结构是一种怎样的树呢?
这样我们就提出了一个新的查找树结构——多路查找树。根据平衡二叉树的启发,自然就想到平衡多路查找树结构,也就是这篇文章所要阐述的第一个主题B~tree,即B树结构(后面,我们将看到,B树的各种操作能使B树保持较低的高度,从而达到有效避免磁盘过于频繁的查找存取操作,从而有效提高查找效率)。
B-tree(B-tree树即B树,B即Balanced,平衡的意思)这棵神奇的树是在Rudolf Bayer, Edward M. McCreight(1970)写的一篇论文《Organization and Maintenance of Large Ordered Indices》中首次提出的(wikipedia中:http://en.wikipedia.org/wiki/B-tree,阐述了B-tree名字来源以及相关的开源地址)。
在开始介绍B~tree之前,先了解下相关的硬件知识,才能很好的了解为什么需要B~tree这种外存数据结构。
2.外存储器—磁盘
计算机存储设备一般分为两种:内存储器(main memory)和外存储器(external memory)。 内存存取速度快,但容量小,价格昂贵,而且不能长期保存数据(在不通电情况下数据会消失)。
外存储器—磁盘是一种直接存取的存储设备(DASD)。它是以存取时间变化不大为特征的。可以直接存取任何字符组,且容量大、速度较其它外存设备更快。
2.1磁盘的构造
磁盘是一个扁平的圆盘(与电唱机的唱片类似)。盘面上有许多称为磁道的圆圈,数据就记录在这些磁道上。磁盘可以是单片的,也可以是由若干盘片组成的盘组,每一盘片上有两个面。如下图11.3中所示的6片盘组为例,除去最顶端和最底端的外侧面不存储数据之外,一共有10个面可以用来保存信息。
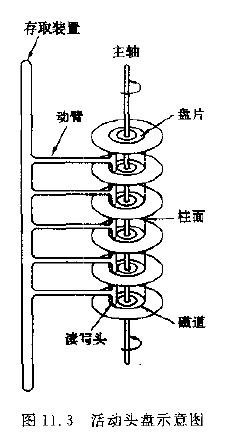
当磁盘驱动器执行读/写功能时。盘片装在一个主轴上,并绕主轴高速旋转,当磁道在读/写头(又叫磁头) 下通过时,就可以进行数据的读 / 写了。
一般磁盘分为固定头盘(磁头固定)和活动头盘。固定头盘的每一个磁道上都有独立的磁头,它是固定不动的,专门负责这一磁道上数据的读/写。
活动头盘 (如上图)的磁头是可移动的。每一个盘面上只有一个磁头(磁头是双向的,因此正反盘面都能读写)。它可以从该面的一个磁道移动到另一个磁道。所有磁头都装在同一个动臂上,因此不同盘面上的所有磁头都是同时移动的(行动整齐划一)。当盘片绕主轴旋转的时候,磁头与旋转的盘片形成一个圆柱体。各个盘面上半径相同的磁道组成了一个圆柱面,我们称为柱面 。因此,柱面的个数也就是盘面上的磁道数。
2.2磁盘的读/写原理和效率
磁盘上数据必须用一个三维地址唯一标示:柱面号、盘面号、块号(磁道上的盘块)。
读/写磁盘上某一指定数据需要下面3个步骤:
(1) 首先移动臂根据柱面号使磁头移动到所需要的柱面上,这一过程被称为定位或查找 。
(2) 如上图11.3中所示的6盘组示意图中,所有磁头都定位到了10个盘面的10条磁道上(磁头都是双向的)。这时根据盘面号来确定指定盘面上的磁道。
(3) 盘面确定以后,盘片开始旋转,将指定块号的磁道段移动至磁头下。
经过上面三个步骤,指定数据的存储位置就被找到。这时就可以开始读/写操作了。
访问某一具体信息,由3部分时间组成:
● 查找时间(seek time) Ts: 完成上述步骤(1)所需要的时间。这部分时间代价最高,最大可达到0.1s左右。
● 等待时间(latency time) Tl: 完成上述步骤(3)所需要的时间。由于盘片绕主轴旋转速度很快,一般为7200转/分(电脑硬盘的性能指标之一, 家用的普通硬盘的转速一般有5400rpm(笔记本)、7200rpm几种)。因此一般旋转一圈大约0.0083s。
● 传输时间(transmission time) Tt: 数据通过系统总线传送到内存的时间,一般传输一个字节(byte)大概0.02us=2*10^(-8)s
磁盘读取数据是以盘块(block)为基本单位的。位于同一盘块中的所有数据都能被一次性全部读取出来。而磁盘IO代价主要花费在查找时间Ts上。因此我们应该尽量将相关信息存放在同一盘块,同一磁道中。或者至少放在同一柱面或相邻柱面上,以求在读/写信息时尽量减少磁头来回移动的次数,避免过多的查找时间Ts。
所以,在大规模数据存储方面,大量数据存储在外存磁盘中,而在外存磁盘中读取/写入块(block)中某数据时,首先需要定位到磁盘中的某块,如何有效地查找磁盘中的数据,需要一种合理高效的外存数据结构,就是下面所要重点阐述的B-tree结构,以及相关的变种结构:B+-tree结构和B*-tree结构。
3.二叉查找树
即二叉查找树:
1.所有非叶子结点至多拥有两个儿子(Left和Right);
2.所有结点存储一个关键字;
3.非叶子结点的左指针指向小于其关键字的子树,右指针指向大于其关键字的子树;
如下图所示:
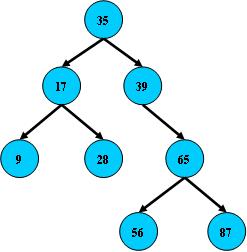
二叉查找树的搜索,从根结点开始,如果查询的关键字与结点的关键字相等,那么就命中;
否则,如果查询关键字比结点关键字小,就进入左儿子;如果比结点关键字大,就进入
右儿子;如果左儿子或右儿子的指针为空,则报告找不到相应的关键字;
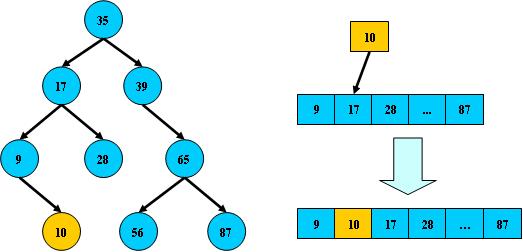
如果二叉查找树的所有非叶子结点的左右子树的结点数目均保持差不多(平衡),那么二叉查找树
的搜索性能逼近二分查找;但它比连续内存空间的二分查找的优点是,改变二叉查找树结构
(插入与删除结点)不需要移动大段的内存数据,甚至通常是常数开销;
如:
但B树在经过多次插入与删除后,有可能导致不同的结构:
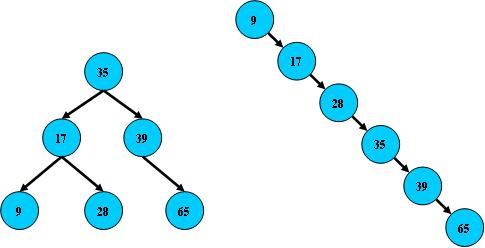
右边也是一个二叉查找树,但它的搜索性能已经是线性的了;同样的关键字集合有可能导致不同的
树结构索引;所以,使用二叉查找树还要考虑尽可能让二叉查找树保持左图的结构,和避免右图的结构,也就
是所谓的“平衡”问题;
实际使用的二叉查找树都是在原二叉查找树的基础上加上平衡算法,即“平衡二叉树”;如何保持B树
结点分布均匀的平衡算法是平衡二叉树的关键;平衡算法是一种在二叉查找树中插入和删除结点的
策略;
4.B- 树
3.1什么是B-树
具体讲解之前,有一点,再次强调下:B-树,即为B树。因为B树的原英文名称为B-tree,而国内很多人喜欢把B-tree译作B-树,其实,这是个非常不好的直译,很容易让人产生误解。如人们可能会以为B-树是一种树,而B树又是一种一种树。而事实上是,B-tree就是指的B树。特此说明。
我们知道,B 树是为了磁盘或其它存储设备而设计的一种多叉(下面你会看到,相对于二叉,B树每个内结点有多个分支,即多叉)平衡查找树。与本blog之前介绍的红黑树很相似,但在降低磁盘I/0操作方面要更好一些。许多数据库系统都一般使用B树或者B树的各种变形结构,如下文即将要介绍的B+树,B*树来存储信息。
B树与红黑树最大的不同在于,B树的结点可以有许多子女,从几个到几千个。那为什么又说B树与红黑树很相似呢?因为与红黑树一样,一棵含n个结点的B树的高度也为O(lgn),但可能比一棵红黑树的高度小许多,应为它的分支因子比较大。所以,B树可以在O(logn)时间内,实现各种如插入(insert),删除(delete)等动态集合操作。
如下图所示,即是一棵B树,一棵关键字为英语中辅音字母的B树,现在要从树种查找字母R(包含n[x]个关键字的内结点x,x有n[x]+1]个子女(也就是说,一个内结点x若含有n[x]个关键字,那么x将含有n[x]+1个子女)。所有的叶结点都处于相同的深度,带阴影的结点为查找字母R时要检查的结点):
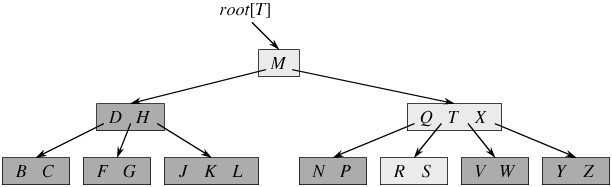
相信,从上图你能轻易的看到,一个内结点x若含有n[x]个关键字,那么x将含有n[x]+1个子女。如含有2个关键字D H的内结点有3个子女,而含有3个关键字Q T X的内结点有4个子女。
B树的定义,从下文中,你将看到,或者是用阶,或者是用度,如下段文字所述: Unfortunately, the literature on B-trees is not uniform in its use of terms relating to B-Trees. (Folk & Zoellick 1992, p. 362) Bayer & McCreight (1972), Comer (1979), and others define the order of B-tree as the minimum number of keys in a non-root node. Folk & Zoellick (1992) points out that terminology is ambiguous because the maximum number of keys is not clear. An order 3 B-tree might hold a maximum of 6 keys or a maximum of 7 keys. (Knuth 1998,TAOCP p. 483) avoids the problem by defining the order to be maximum number of children (which is one more than the maximum number of keys).
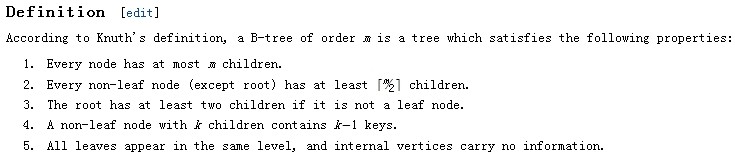
from: http://en.wikipedia.org/wiki/Btree#Technical_description。
用阶定义的B树
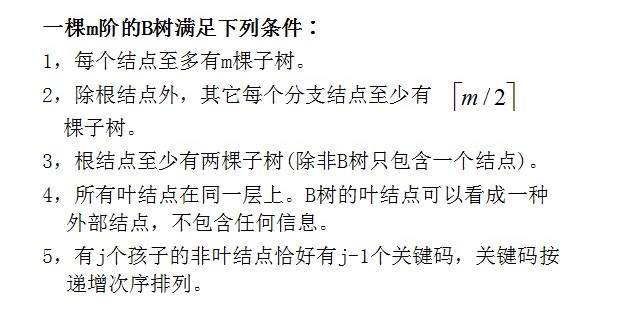
B 树又叫平衡多路查找树。一棵m阶的B 树 (注:切勿简单的认为一棵m阶的B树是m叉树,虽然存在四叉树,八叉树,KD树,及vp/R树/R*树/R+树/X树/M树/线段树/希尔伯特R树/优先R树等空间划分树,但与B树完全不等同)的特性如下:
树中每个结点最多含有m个孩子(m>=2);
除根结点和叶子结点外,其它每个结点至少有[ceil(m / 2)]个孩子(其中ceil(x)是一个取上限的函数);
若根结点不是叶子结点,则至少有2个孩子(特殊情况:没有孩子的根结点,即根结点为叶子结点,整棵树只有一个根节点);
所有叶子结点都出现在同一层,叶子结点不包含任何关键字信息(可以看做是外部接点或查询失败的接点,实际上这些结点不存在,指向这些结点的指针都为null);(读者反馈@冷岳:这里有错,叶子节点只是没有孩子和指向孩子的指针,这些节点也存在,也有元素。@研究者July:其实,关键是把什么当做叶子结点,因为如红黑树中,每一个NULL指针即当做叶子结点,只是没画出来而已)。
每个非终端结点中包含有n个关键字信息: (n,P0,K1,P1,K2,P2,......,Kn,Pn)。其中: a) Ki (i=1...n)为关键字,且关键字按顺序升序排序K(i-1)< Ki。 b) Pi为指向子树根的接点,且指针P(i-1)指向子树种所有结点的关键字均小于Ki,但都大于K(i-1)。 c) 关键字的个数n必须满足: [ceil(m / 2)-1]<= n <= m-1。如下图所示:
用度定义的B树
针对上面的5点,再阐述下:B树中每一个结点能包含的关键字(如之前上面的D H和Q T X)数有一个上界和下界。这个下界可以用一个称作B树的最小度数(算法导论中文版上译作度数,最小度数即内节点中节点最小孩子数目)m(m>=2)表示。
- 每个非根的内结点至多有m个子女,每个非根的结点必须至少含有m-1个关键字,如果树是非空的,则根结点至少包含一个关键字;
- 每个结点可包含至多2m-1个关键字。所以一个内结点至多可有2m个子女。如果一个结点恰好有2m-1个关键字,我们就说这个结点是满的(而稍后介绍的B树作为B树的一种常用变形,B树中要求每个内结点至少为2/3满,而不是像这里的B树所要求的至少半满);
当关键字数m=2(t=2的意思是,mmin=2,m可以>=2)时的B树是最简单的(有很多人会因此误认为B树就是二叉查找树,但二叉查找树就是二叉查找树,B树就是B树,B树是一棵含有m(m>=2)个关键字的平衡多路查找树),此时,每个内结点可能因此而含有2个、3个或4个子女,亦即一棵2-3-4树,然而在实际中,通常采用大得多的t值。
- B树中的每个结点根据实际情况可以包含大量的关键字信息和分支(当然是不能超过磁盘块的大小,根据磁盘驱动(disk drives)的不同,一般块的大小在1k~4k左右);这样树的深度降低了,这就意味着查找一个元素只要很少结点从外存磁盘中读入内存,很快访问到要查找的数据。如果你看完上面关于B树定义的介绍,思维感觉不够清晰,请继续参阅下文第6小节、B树的插入、删除操作 部分。